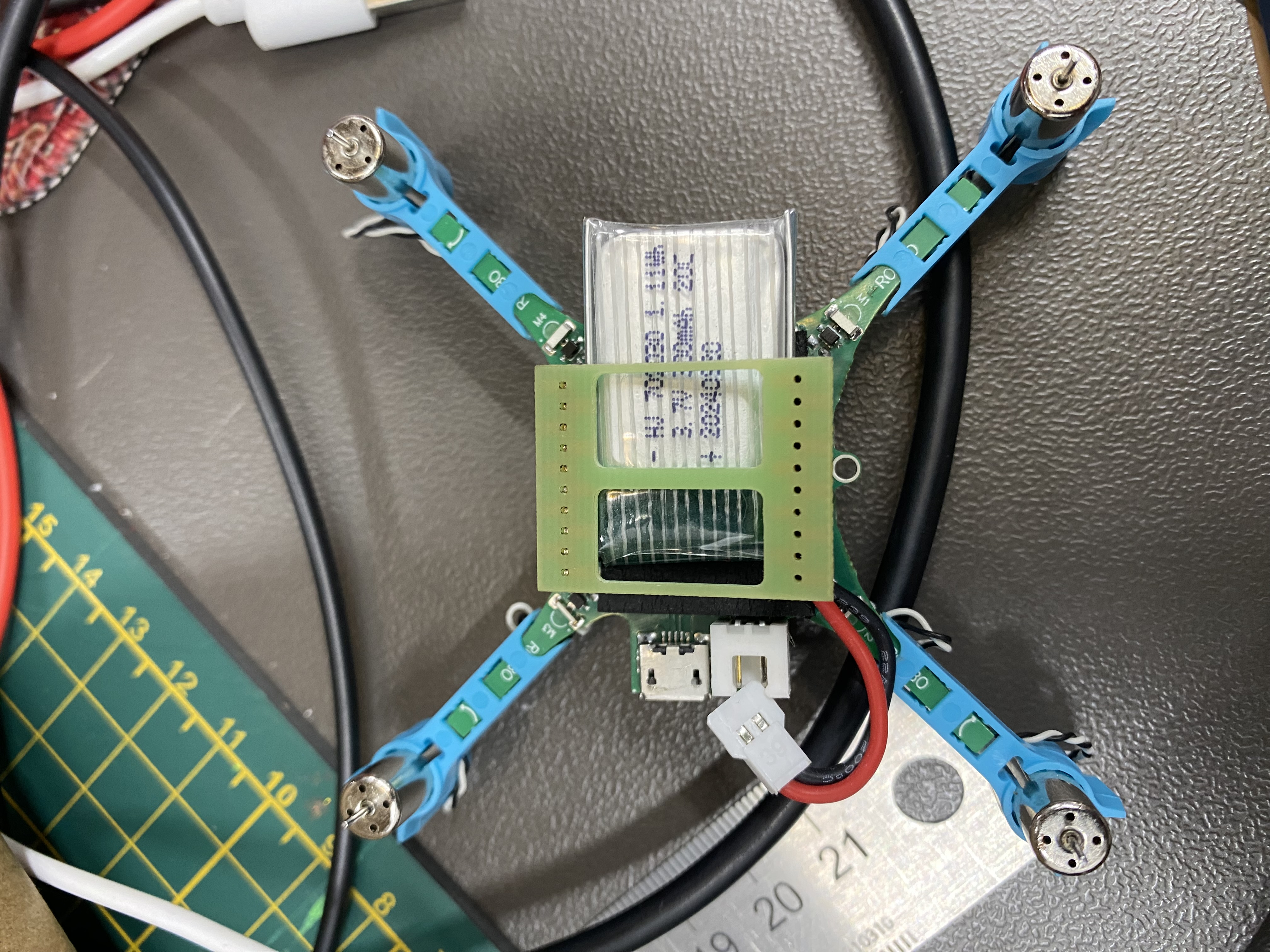
Универсальная платформа для разработки летательных аппаратов с открытым исходным кодом, которая весит всего 27 г и может уместиться на ладони. Оснащен радио с ни…
Отличительные особенности продукта
Универсальная платформа для разработки летательных аппаратов с открытым исходным кодом, которая весит всего 27 г и может уместиться на ладони. Оснащен радио с низкой задержкой/дальним радио, а также Bluetooth LE.
Это дает Вам возможность загрузить наше приложение и использовать мобильное устройство в качестве контроллера, используя Ваш компьютер для отображения данных и полета с игровым контроллером.
Квадрокоптер программируется с помощью блочного языка программирования RobboScratch3.0, аналогично ROBBO Robot Kit.
Marker Kniga.jpg Типы решаемых учебных задач
Методический блок «РОББО.Коптер. Знакомство и программирование БПЛА» Для возраста от 8—9 лет. Рекомендовано для учеников 2-го года обучения. Курс обучения Scratch-программирования квадрокоптера состоит из 10 уроков, продолжительностью по 45 минут каждый. Предполагается, что ребенок уже владеет навыками программирования в Scratch. На протяжении курса объясняется техника безопасности использования квадрокоптера, базовые физические принципы полета, рассказывается о правильном пилотировании и программировании квадрокоптера. В первой половине курса будут изучаться блоки управления квадрокоптером и сразу применятся в реальных условиях. После чего курс предлагает уроки по программированию сложного движения квадрокоптера с активным использованием телеметрии в переменных. Курс позволяет понять, что такое трехмерная система координат и активно ей пользоваться. Последняя часть курса направлена на рефлексию и закрепление материала, курс предлагает связать квадрокоптер с РОББО.Лабораторией (также ScratchDuino.Лабораторией) и с помощью последней осуществлять управление, а на последнем уроке предлагается провести небольшое соревнование. Курс состоит из 10 уроков:
Беспилотный летательный аппарат, полетная система координат, техника безопасности, первый полет. Зависание квадрокоптера, почему он летает, как удерживает высоту. Посадка на точку взлета, множественная посадка, перемещение в одной плоскости. Движение по фигуре, посадка на заранее заданную площадку. Повороты вокруг вертикальной оси, вращение, угол поворота, способы задания угла. Полеты по кругу, использований всех возможностей квадрокоптера. Полет по восьмерке. Полеты над неровной местностью. Лаборатория + РОББО.Коптер. Соревнование.
Marker Robot z.jpg Интеграция с другими видами оборудования РОББО
Marker Strelki.jpg Интеграция с оборудованием других производителей
Marker Schestiryonki.png Технические параметры
Характеристики коптера
Прочный дизайн Поддержка плат расширения с автоматическим обнаружением Поддерживает полет с iOS и Android с Bluetooth LE, а также от систем Windows /MacOSX/Linux Бортовая зарядка через стандартный micro USB Механические характеристики
Взлетная масса: 27 г Размер (ШхВхГ): 92x92x29 мм (двигатель-двигатель и включая ножки крепления двигателя) Технические характеристики радиосвязи
Радиочастотный усилитель 20 дБм, испытанный в диапазоне> 1 км Поддержка Bluetooth Low Energy с доступными iOS и Android-клиентами (протестирована на iOS 7.1+ и Android 4.4+) STM32F405 основное приложение MCU (Cortex-M4, 168MHz, 192kb SRAM, 1Mb flash) nRF51822 радиоуправление и управление питанием MCU (Cortex-M0, 32Mhz, 16kb SRAM, 128kb flash) разъем micro USB Встроенное зарядное устройство LiPo с режимами 100 мА, 500 мА и 980 мА Полноскоростной интерфейс USB-устройства Частичная возможность USB OTG (USB OTG присутствует, но нет выхода 5 В) EEPROM объёмом 8 КБ ИДУ
3-осевой гироскоп (MPU-9250) 3-осевой акселерометр (MPU-9250) 3-осевой магнитометр (MPU-9250) высокоточный датчик давления (LPS25H) Характеристики полета
Время полета с аккумуляторной батареей: 7 минут Время зарядки аккумуляторной батареей: 40 минут Максимальный рекомендуемый вес полезной нагрузки: 15 г Поддерживаемые клиенты / контроллеры
Клиент Python для Windows, Linux или OSX Игровые площадки, используемые Xbox 360 и Playstation 3, используются в качестве эталонных контроллеров Любой геймпад / контроллер с не менее чем 4 аналоговыми осями Android-устройство Android Мобильное устройство iOS Разъемы расширения
VCC (3,0 В, не более 100 мА) GND VCOM (нерегулируемый VBAT или VUSB, макс. 1A) VUSB (как для ввода, так и для вывода) I2C (400 кГц) SPI 2 x UART 4 x GPIO / CS для SPI 1-проводная шина для идентификации расширения 2 x GPIO подключен к nRF51 Характеристики антенны Дистанционный USB-ключ на дальнем расстоянии. Он оснащен усилителем мощности 20 дБм, LNA и запрограммирован с помощью прошивки, совместимой с коптером. Усилитель мощности усиливает диапазон, предоставляя дальность видимости более 1 км.
Усилитель мощности, обеспечивающий выходную мощность 20 дБм > 1km диапазон 2x5 2.54 мм для прототипирования (не монтируется) Аппаратная поддержка PPM Прошивка с открытым исходным кодом Обновление прошивки через USB Низкая латентность Спецификация
8051 MCU на частоте до 16 МГц с 32 Кб flash и 2 КБ SRAM Радиочастотная полоса 2,4 ГГц ISM USB-периферия устройства 125 радиоканалов Скорость передачи данных 2 Мбит / с, 1 Мбит /с и 250 Кбит /с Отправляет и принимает пакеты данных с полезной нагрузкой до 32 байтов Автоматически обрабатывает адреса и пакеты Аппаратные средства SPI и UART Радиотехника
Выходная мощность 20 дБм (100 мВт) Усилитель с низким уровнем шума (LNA) Разъем RP-SMA Может питаться от 13В через разъем расширения Разъем расширения 2.54мм 2x5 со следующими сигналами: Аппаратная поддержка ввода PPM До 13 В входной мощности GND PPM SPI / UART Стандартный разъем USB-A Механические характеристики
Вес: 6 г Размер (ШхВхГ): 58x16x6.5 мм (включая разъемы)
Личные заметки и практика
18.07.2025 11:02
На данный момент могу предоставить вам следующую информацию: 1. Пошаговая инструкция по подключению, а затем и по запуску квадрокопетра через библиотеку cflib на python (по ссылке в самом конце есть ссылка на следующую инструкцию) - https://www.bitcraze.io/documentation/repository/crazyflie-lib-python/master/user-guides/sbs_connect_log_param/ 2. Ссылка на описание методов класса MotionCommander для управления квадрокоптером (перемещение, поворот и пр.) https://www.bitcraze.io/documentation/repository/crazyflie-lib-python/master/api/cflib/positioning/motion_commander/